Image Filters dialog
collection of image filters arranged into 4 categories:
- Basic image filtering in the spacial domain
- Edge-preserving filtering
- Contrast adjustment
- Image binarization
A demonstration is available in the following video:
 https://youtu.be/QZU3jSoEXJM
https://youtu.be/QZU3jSoEXJM
Back to Index --> User Guide --> Menu --> Image
Contents
-
Options -
Basic image filtering in the spacial domain -
Edge-preserving filtering -
Contrast adjustment -
Image binarization
Options
Prior filtering of images the following options may be tweaked:
- Dataset type - specify whether the image filtering should be done for the shown slice, current 3D stack of the whole dataset
- Source layer - allows to select a source layer which will be filtered
- Color channel - list of existing color channels. It is possible to select a specific color channel, all shown color channels or just all color channels of the image
-
Material index - index of material to filter, only when
Source layerisModel - 3D - check to apply 3D filter
The filtered image may additionally be post-processed (a dropdown at the bottom of the dialog window) as
- Filter image - filter image and display it as result of the operation
- Filter and subtract - filter image and subtract the result from the unfiltered image
- Filter and add - filter image and add the result to the unfiltered image
Basic image filtering in the spacial domain
table with the list of available filters
 |
Average filter
average image signal using a rectanlular filter; the filtering is done with imfilter function and the "average" predefined filter from fspecial |
2D/3D |
|
Circular averaging filter (pillbox)
average image signal using a disk-shaped filter; the filtering is done with imfilter function and the "disk" predefined filter from fspecial |
2D |
 |
Distance map filter
Calculate distance map from seeds provided in the "Source Layer" dropdown. The 2D map is calculated using MATLAB bwdist, while 3D using bwdistsc by Yuriy Mishchenko The Source Layer should be one of these options: "selection", "mask", "material". Four calculations methods are available for the 2D mode, while in the 3D mode only the "euclidean" method is used. |
2D/3D |
 |
Elastic distortion filter
Elastic distortion filter, based on Best Practices for Convolutional Neural Networks Applied to Visual Document Analysis by Patrice Y. Simard, Dave Steinkraus, John C. Platt (link) and codes available: stackoverflow Elastic Distortion Transformation by David Franco |
2D |
 |
Entropy filter
Local entropy filter, returns an image, where each output pixel contains the entropy (-sum(p.*log2(p), where p contains the normalized histogram counts) of the defined neighborhood around the corresponding pixel, see details in entropyfilt |
2D |
 |
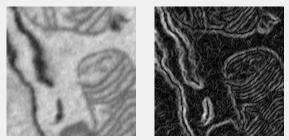
Frangi filter
Frangi filter to enhance elongated or tubular structures using Hessian-based multiscale filtering The filtering is done with fibermetric |
2D/3D |
 |
Gaussian smoothing filter
Rotationally symmetric Gaussian lowpass filter of size (Hsize) with standard deviation (Sigma). The 2D filtering is done with imgaussfilt and 3D with imgaussfilt3 |
2D/3D |
 |
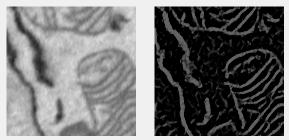
Gradient filter
Calculate image gradient The filtering is done with gradient function and the acquired X,Y,Z components are converted to the resulting image as sqrt(X2 + Y2 + Z2) |
2D/3D |
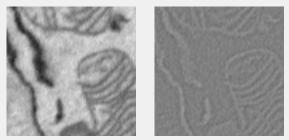 |
Laplacian of Gaussian filter
Filter the image using the Laplacian of Gaussian filter, which highlights the edges The resulting image is converted to unsigned integers by its multiplying with the NormalizationFactor and adding half of max class integer value. The filtering is done with imfilter function and the "log" predefined filter from fspecial |
2D/3D |
 |
Mathematical operations
Apply standard mathematical operations: add, subtract, multiply, or divide to the image. During the operation it is possible to convert image class to a different type. |
2D |
 |
Mode filter (R2020a or newer)
the filtering is done with modefilt function. Each output pixel contains the mode (most frequently occurring value) in the neighborhood around the corresponding pixel in the input image |
2D/3D |
 |
Motion filter
the filtering is done with imfilter function and the "motion" predefined filter from fspecial |
2D |
 |
Prewitt filter
Prewitt filter for edge enhancement the filtering is done with imfilter function and the "prewitt" predefined filter from fspecial |
2D/3D |
 |
Range filter
Local range filter, returns an image, where each output pixel contains the range value (maximum value - minimum value) of the defined neighborhood around the corresponding pixel. See details in rangefilt |
2D/3D |
 |
Salt and pepper filter
Remove salt & pepper noise from image The images are filtered using the median filter, after that a difference between the original and the median filtered images is taken. Pixels that have threshold higher than IntensityThreshold are considered as noise and removed |
2D |
 |
Sobel filter
Sobel filter for edge enhancement the filtering is done with imfilter function and the "sobel" predefined filter from fspecial |
2D |
 |
Std filter
Local standard deviation of image. The value of each output pixel is the standard deviation of a neighborhood around the corresponding input pixel. The borders are extimated via symmetric padding: i.e. the values of padding pixels are a mirror reflection of the border pixels. See details in stdfilt |
2D |
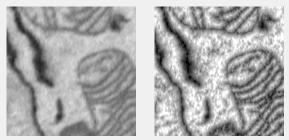
Edge-preserving filtering
Remove noise while preserve the edges of the objects using one of the following filters
 |
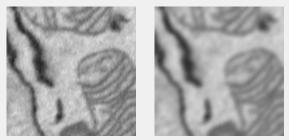
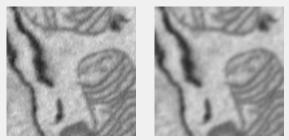
Anisotropic diffusion filter
Edge preserving anisotropic diffusion filtering of images with Perona-Malik algorithm The filtering is done with imdiffusefilt |
2D |
 |
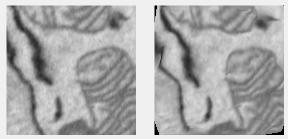
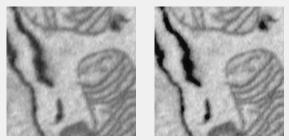
Bilateral filter
Edge preserving bilateral filtering of images with Gaussian kernels The filtering is done with imbilatfilt |
2D |
 |
DNNdenoise filter
Denoise image using deep neural network The filtering is done with denoiseImage |
2D |
 |
Median filter
Median filtering of images in 2D or 3D. Each output pixel contains the median value in the specified neighborhood The 2D filtering is done with medfilt2 and 3D with medfilt3 |
2D |
 |
Non-local means filter
The filtering is done with imnlmfilt |
2D |
 |
BMxD filter
Filtering image using the block-matching and 3D collaborative algorithm, please note that this filter is only licensed to be used in non-profit organizations Please follow the system requirements page on details how to install it. |
2D |
Contrast adjustment
Here the list of filters that are intended to adjust the contrast of images
 |
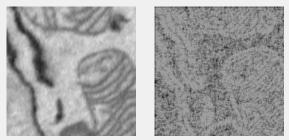
Add noise filter
Add noise to image The filtering is done with imnoise
|
2D |
 |
Fast Local Laplacian filter
Fast local Laplacian filtering of images to enhance contrast, remove noise or smooth image details The filtering is done with locallapfilt |
2D |
 |
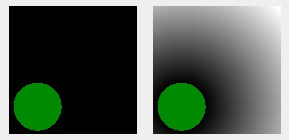
Flat-field correction
Flat-field correction to the grayscale or RGB image. The correction uses Gaussian smoothing with a standard deviation of sigma to approximate the shading component of the image The filtering is done with imflatfield |
2D |
 |
Local Brighten filter
Brighten low-light image The filtering is done with imlocalbrighten |
2D |
 |
Local Contrast filter
Edge-aware local contrast manipulation of images The filtering is done with localcontrast |
2D |
 |
Reduce Haze filter
Reduce atmospheric haze The filtering is done with imreducehaze |
2D |
 |
Unsharp mask filter
Sharpen image using unsharp masking: when an image is sharpened by subtracting a blurred (unsharp) version of the image from itself The filtering is done with imsharpen |
2D |
Image binarization
The image binarization filters process the image and generate bitmap mask that can be assigned to the selection or mask layers of MIB (use the DestinationLayer dropdown to specify it)
 |
Edge filter
Find edges in intensity image; the filtering is done with edge
|
2D |
 |
SLIC clustering filter
Cluster together pixels of similar intensity using the SLIC (Simple Linear Iterative Clustering) algorithm
|
2D |
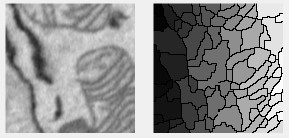 |
Watershed clustering filter
Cluster together pixels based on presence of ridges using the watershed algorithm
|
2D |
Back to Index --> User Guide --> Menu --> Image